파워밀 로봇 트레이닝 (4)
파워밀 로봇(PowerMill Robot)은 가공 툴패스를 프로그램에 따라 로봇 경로로 변환하는데
사용된다. 이를 통해 사용자는 로봇의 최종 동작을 시뮬레이션하고 분석할 수 있다.
이번 호에서는 파워밀 로봇의 로봇 속성 창(Robot Configuration Form)에 대해 살펴본다.
■ 이경하 | 한국델켐 기술개발본부 수석 컨설턴트로 델켐 프로덕트의 기술지원 및 교육, 파워밀 실무 능력 시험 출제 및 채점, NCS(국가 직무능력 표준) 교재 및 교육 콘텐츠 개발 업무를 담당하고 있다.
E-mail | gelma@delcam.co.kr
홈페이지 | www.delcam.co.kr
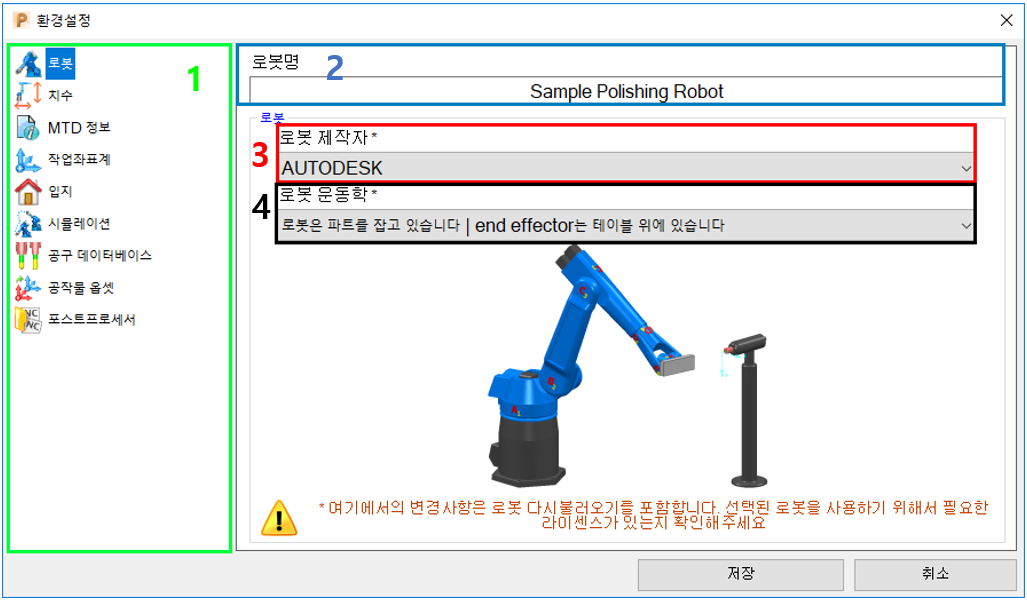
로봇 속성(Robot Configuration)은 로봇 항목(셀) 탭에서 찾을 수 있으며, 로봇에 대한 정보와 툴패스가 로봇의 언어로 작성되는 방법을 포함하여 특정 로봇 셀의 기본 동작을 저장한다.

환경 설정은 로봇을 설정한 유형으로 나눈 값을 저장한다.
■ 언제든지 Robot Configuration Form의 설정을 변경/편집할 수 있다.
■ mtd와 RobConfig 파일은 파워밀 로봇에서 로봇의 올바른 정의를 담당한다.
■ Robot Configuration Form은 RobConfig 파일의 생성을 담당한다.
1. 로봇 페이지(Robot Page)