리어 서스펜션 시스템 Ⅱ
이번 호에서는 스마트 모빌리티 차량의 리어 서스펜션 시스템(RR SUSPENSION SYSTEM)의 주요 구성 부품 중 하나인 리어 너클-좌(RR KNUCKLE-LH) 부품의 설계 방법론에 대해 설명하고자 한다.
예제 파일은 캐드앤그래픽스 홈페이지(http://www.cadgraphics.co.kr)의 자료창고에서 받을 수 있으며, 모델링 강좌 동영상을 참고하기 바란다. 예제 따라하기는 카티아 V5 R20 이상 버전을 추천한다.
■ 김인규 | 브이엔에스에서 엔지니어링 컨설팅업무를 담당하고 있으며, 대학교 및 기관에서 설계 강의를 하고 있다. ‘CATIA 스마트 모빌리티 섀시 설계하기’의 저자이다.
이메일 | e_vns@naver.com
카페 | https://cafe.naver.com/evns
RR KNUCKLE-LH 시스템 구성도 및 모델링 방법론 소개
RR KNUCKLE-LH 구성 부품은 <그림 1>과 같이 RR KNUCKLE, BUSH로 구성되어 있다. 설계 절차는 하향식(top-down)으로 모델링해야 하며, 마스터 스켈레톤 디자인의 지오메트리를 참조해서 복합 파트 모델링한다.

그림 1
2. RR KNUCKLE-LH : 마스터 지오메트리 모델링
(1) 마스터 스켈레톤 디자인에서 생성한 참조 지오메트리를 <그림 2>와 같이 카티아에서 파일을 변환한다.(파일 : RR KNUCKLE-LH.igs)
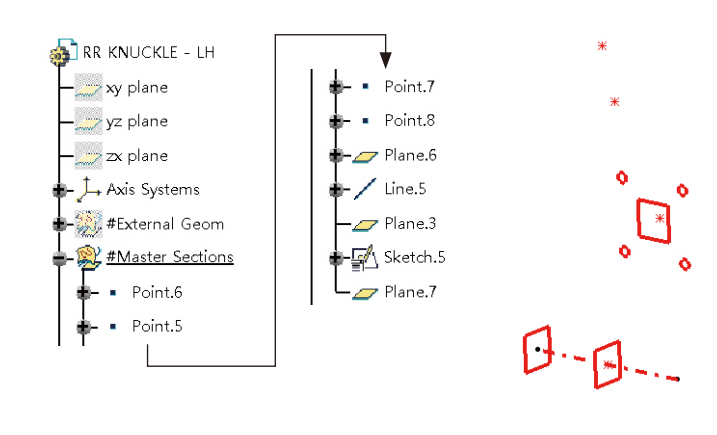
그림 2
(2) 파일 : RR KNUCKLE-LH.igs에서 변환된 지오메트리를 참조하여, 상대 부품과 조립 및 체결에 필요한 지오메트리(plane, point, line)을 생성한다.
***따라하기 포맷 끝
■ 조립 및 체결되는 부분을 고려하여, <그림 3>과 같이 마스터 지오메트리를 생성한다.
■ 앞에서 생성한 지오메트리는 상대부품과 어셈블리할 때 참조하여 사용한다.