BIM 칼럼니스트 강태욱의 이슈 & 토크
이번 호에서는 라이다(LiDAR : Light Detection and Ranging)를 기반으로 실시간 3차원 지도를 생성하는 SLAM(Simultaneous Localization and Mapping : 슬램)을 사용해, 원격제어가 가능한 로버(rover) 로봇을 기반으로 하는 3차원 지도 매핑 장비 개발 방법을 설명한다. SLAM은 임의의 위치에서 상대적 거리를 측정할 수 있는 센서를 이용해 실시간으로 지도를 생성하는 기술이다. 이 기술은 무인자율차 등 실시간으로 2, 3차원 지도를 생성해야 할 때 사용된다.
■ 강태욱 | 건설환경 공학을 전공하였고 소프트웨어 공학을 융합하여 세상이 돌아가는 원리를 분석하거나 성찰하기를 좋아한다. 건설과 소프트웨어 공학의 조화로운 융합을 추구하고 있다. 팟캐스트 방송을 통해 Engineering digest와 관련된 작은 메시지를 만들어 나가고 있다. 현재 한국건설기술연구원에서 BIM/GIS/FM/BEMS/역설계 등과 관련해 연구를 하고 있으며, 연구위원으로 근무하고 있다.
이메일 | laputa99999@gmail.com
페이스북 | http://www.facebook.com/laputa999
홈페이지 | https://sites.google.com/site/bimprinciple
팟캐스트 | http://www.facebook.com/groups/digestpodcast
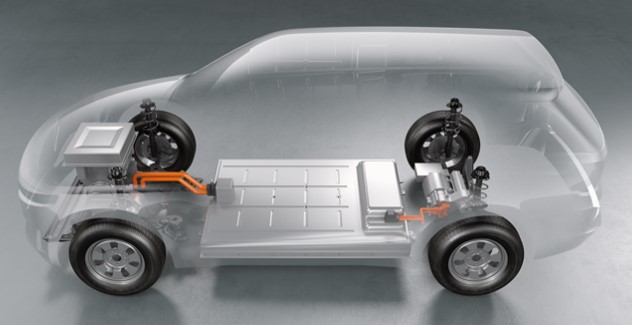

그림 1. 개념적으로 로버와 유사한 동작방식을 가진 무인자율차(ArcelorMittal, 2021, Automotive Manufacturing Solutions. Tesla)
로버는 로봇의 일종으로, 통신 신호나 소프트웨어 알고리즘으로 이동 및 동작 방식을 제어할 수 있는 원격제어 지상형 무인자동차의 일종이다. 로버를 이용하면 사람이 진입하기 어려운 위험한 곳이나 많은 수의 반복적인 데이터 조사가 필요한 데이터를 무인으로 수집하며 자동 제어를 할 수 있다.
이번 호에서는 3차원 공간정보 취득을 위해서 라이다와 SLAM 기술을 사용한다. 라이다는 저가의 벨로다인 VLP16 센서를 사용한다. 라이다 구동 및 SLAM 소프트웨어는 리눅스 우분투 ROS 환경에서 실행된다. 여기서 사용하는 ROS(Robot Operating System) melodic 버전을 사용했으며, 엔비디아 TX2, 오드로이드 우분투 18.04를 기반으로 테스트하였다. SLAM은 많은 계산시간이 필요하므로, 엔비디아 TX와 같이 가능한 성능이 좋은 컴퓨터를 사용하는 것이 좋다.
3차원 스캔 기반 인스펙션 로버 로봇
3차원 공간정보 스캔을 몇 시간동안 지속적으로 운영하기 위해서는 드론보다 로버가 훨씬 효과적이다. 드론은 배터리를 고려한 운영시간에 크게 제약(보통 20~30분 미만)이 있으며, 무거운 센서를 부착하는데 한계가 많다.
지상에서 충분히 데이터를 취득할 수 있다면, 가용성이 큰 로버가 좋은 선택이 될 수 있다. 3차원 공간 탐색용 기능을 만족하고 가성비가 좋은 로버는 시중에 그리 많지 않다. 그러므로, 커스텀할 수 있는 제품 중 AIDL(http://aidl.kr)의 ADL200 본체를 사용하였다. 라이다 등 목적에 따라 달라지는 다양한 센서와 장치를 마운트(mount)하기 위한 부품은 별도 디자인, 제작하여 부착하였다. 로버 로봇의 운영 요구사항은 다음과 같다.