BIM 칼럼니스트 강태욱의 이슈 & 토크
BIM(Building Information Modeling) 데이터 구축을 위해서는 많은 노력이 필요하다. 특히 도면이 정확하지 않은 경우, 스캔 및 비전 등 공간을 매핑하는 기술이 필요하다. 이번 호에서는 스테레오 비전 기술을 이용해 3차원 공간정보를 매핑하는 ZED 센서 기술을 소개한다.
■ 강태욱 | 건설환경 공학을 전공하였고 소프트웨어 공학을 융합하여 세상이 돌아가는 원리를 분석하거나 성찰하기를 좋아한다. 건설과 소프트웨어 공학의 조화로운 융합을 추구하고 있다. 팟캐스트 방송을 통해 Engineering digest와 관련된 작은 메시지를 만들어 나가고 있다. 현재 한국건설기술연구원에서 BIM/GIS/FM/BEMS/역설계 등과 관련해 연구를 하고 있으며, 연구위원으로 근무하고 있다.
이메일 | laputa99999@gmail.com
페이스북 | www.facebook.com/laputa999
홈페이지 | https://sites.google.com/site/bimprinciple
팟캐스트 | http://www.facebook.com/groups/digestpodcast
스테레오 비전 기술은 동일한 장면에 대한 촬영 이미지를 서로 다른 두 지점에서 카메라가 촬영했을 때, 그 두 지점에서 촬영한 영상의 동일한 특징점을 이용해 3차원 깊이 값을 얻는 기술이다. 이 기술은 우리가 양쪽 눈에 맺힌 상에서 장면의 3차원을 인식하는 것과 유사하다.
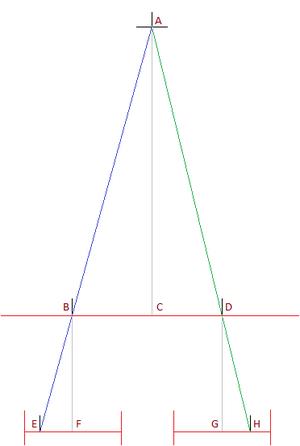
그림 1. 스테레오 버전의 원리
스테레오랩(Stereolabs)이 개발한 ZED는 비전을 위한 이미지 센서로 듀얼렌즈가 장착된 카메라이다. 고화질 3D 비디오를 캡처할 수 있고, 깊이 인식이 가능하다. 이 카메라는 스테레오 비전 기술을 사용한다. 그러므로, 적외선 RGBD 방식에 비해 강한 햇빛에 큰 영향을 받지 않는다. ZED 센서의 특징은 다음과 같다.
■ 최대 20m 범위에서 깊이 캡처가 가능하다. ULTRA 모드에서는 30m까지 가능함
■ 뎁스맵(depth map) 캡처 속도는 100 FPS(Frame per second)
■ 화각은 최대 90도(H) × 60도(V)
■ 센서는 실내·외 및 실외에서 작동됨
■ 6DOF 지원


그림 2. ZED 카메라 센서